Cv6 è il punto medio della curva di velocità
deve essere
Cv2 (vstart) < Cv6 (vmid) < CV5 (Vhigh)
Sulla base di questi tre punti il decoder calcola una curva pressochè continua e morbida per tutti gli step di velocità intermedi e accelera o rallenta secondo questa curva.
Quindi si regola la Cv5 affinchè la velocità massima con la manopola a fondo corsa sia realistica (o piacevole) per la loco in questione. Lo stesso per la Cv6 con la manopola a mezza corsa (magari proporzionandosi con la curva di velocità della locomotiva vera).
Detto questo e avendo introdotto il concetto della curva di velocità (che puo essere definita per tre punti come sopra ma anche per 28 punti, cv 67-94) veniamo al trimming (regolazione fine) ... vi sono almeno tre usi principali:
1) aggiustare l'una o l'altra direzione di marcia se la loco ha problemi meccanici che rendono diverse le velocità nelle due direzioni;
2) regolare diversamente la marcia indietro rispetto alla marcia avanti che in alcune loco (tipicamente quelle a vapore) è molto più bassa;
3) nel caso delle multitrazioni aggiustare le velocità di una loco rispetto ad un altra
... l'obiettivo di queste due cv è quindi avere una possibilità di tarare finemente le velocità SENZA DOVER INTERVENIRE SULLA CURVA DI VELOCITA'.
In particolare, pensando al caso 3 si puo copiare la curva di velocità di una locomotiva sulle altre loco (supponendole meccanicamente identiche) e poi intervenire solo sulle cv di trimming per pareggiarne le prestazioni ... ovviamente questa cosa è particolarmente comoda e utile se si usa la regolazione a 28 punti, perchè con quella a tre punti è +/- equivalente intervenire direttamente su questi (un + o - però valido solo per piccoli aggiustamenti perchè variazioni più ampie implicano una diversa curva di velocità e difficilmente le due loco marceranno in modo simile a tutti gli step).
Diciamo che nell'uso normale le due cv di trimming possono essere ignorate.
Di seguito come appaiono, tramite il lokprogrammer, le impostazioni dei due tipi di curva di velocità per un decoder ESU ... tutti questi parametri però sono comuni a tutti i decoder (almeno quelli poco più che economici) perchè fanno parte delle norme NMRA/NEM (vedi sotto).
NB: il passaggio dalla curva a 3 punti a quella a 28 punti si fa impostando il bit4 della CV29, di seguito il link a un comodo calcolatore per impostare la cv29 in maniera ragionata:http://www.2mm.org.uk/articles/cv29%20calculator.htmAl di la di della teoria il modo migliore per assimilare questi concetti è fare delle prove sul classico ovalino di test ... buon divertimento!Allegato:
Commento file: impostazione per 3 punti
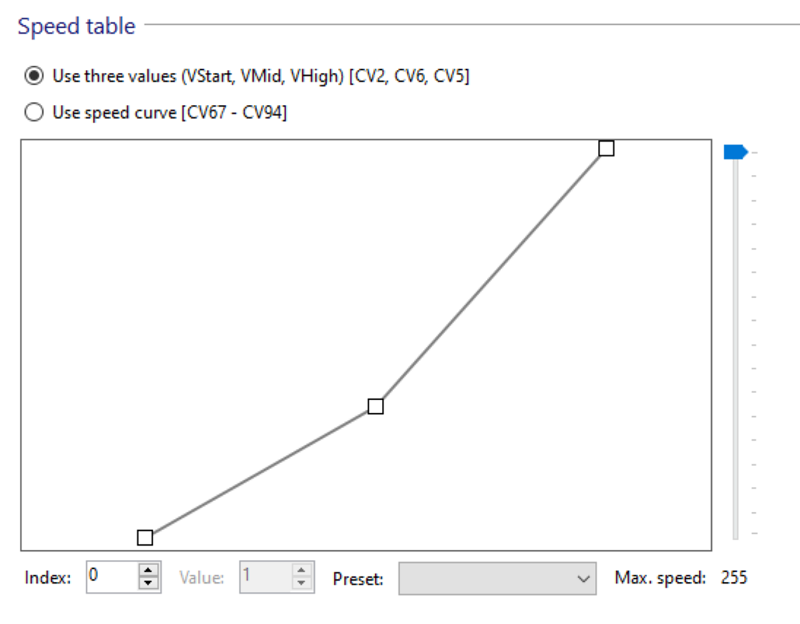 Curva3punti.png [ 63.29 KiB | Osservato 2274 volte ]
Curva3punti.png [ 63.29 KiB | Osservato 2274 volte ]
Allegato:
Commento file: impostazione per 28 punti
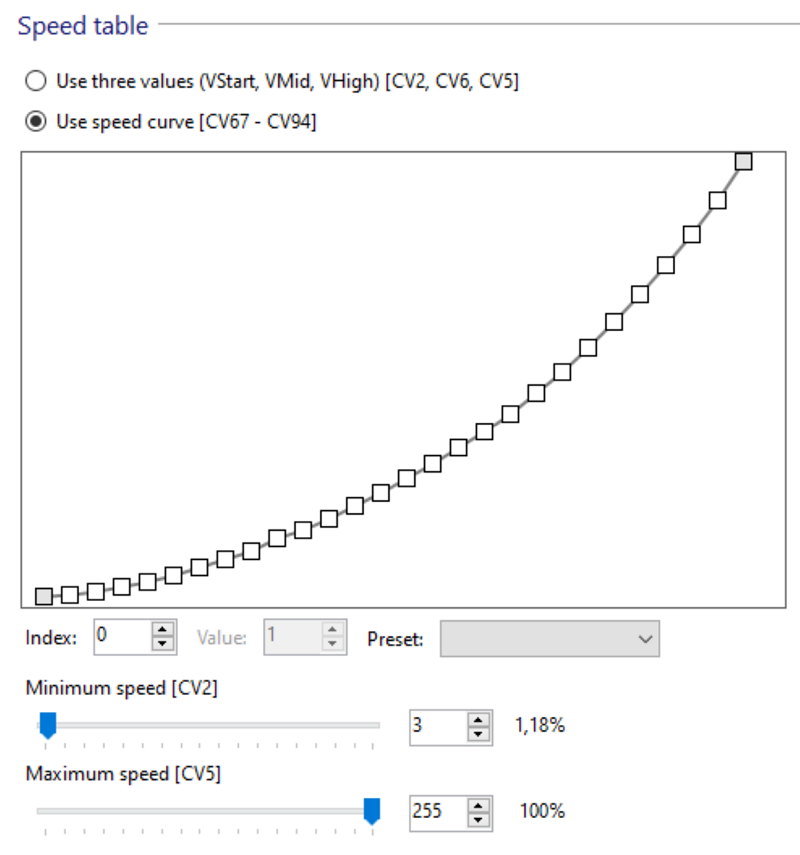 Curva28punti.png [ 97.53 KiB | Osservato 2274 volte ]
Curva28punti.png [ 97.53 KiB | Osservato 2274 volte ]
Estratti dalla norme NMRA
Cita:
Configuration Variable 2 Vstart
Vstart is used to define the voltage drive level used as the start voltage on the motor...
Configuration Variable 5 Vhigh
Vhigh is used to specify the motor voltage drive levels at the maximum speed step...
Configuration Variable 6 Vmid
Vmid specifies the voltage drive level at the middle speed step. Vmid is used to generate a performance curve in the decoder that translate speed step values into motor voltage drive levels ...
Configuration Variable 66: Forward Trim
Specifies a scale factor by which a voltage drive level should be multiplied, when the controller is driving the
unit in the forward direction. It is interpreted as n/128...
Configuration Variables 67-94: Speed Table
The speed table is defined to be 28 bytes wide, consisting of 28 values for forward speeds. A digital controller that uses this table shall have at least 64 voltage drive levels and can have as many as 256 so that a smooth power curve can be constructed...
Configuration Variable 95: Reverse Trim
Specifies a scale factor by which a voltage drive level should be multiplied, when the controller is driving the
unit in reverse. It is interpreted as n/128...




